12. Servo-moteur (faire tourner un servo-moteur de 0 à 180 ° – Catégorie: Moteurs)
L’objectif de cette activité est de faire tourner un servo-moteur de 0 à 180 ° à l’aide d’un potentiomètre.
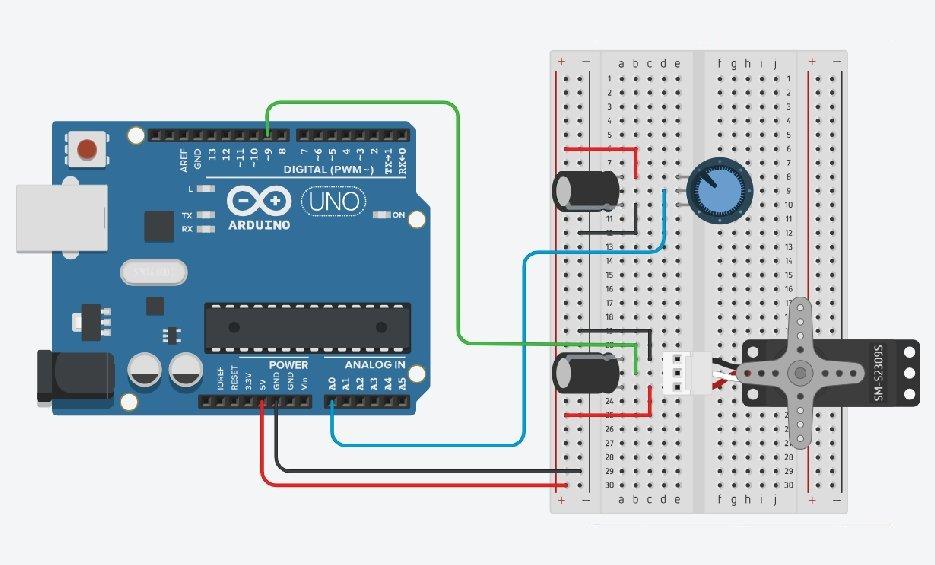
Le servo-moteur a 3 fils de connexion :
– fil rouge : alimentation +5 V
– fil noir : la masse
– fil blanc : fil de contrôle du servo-moteur par l’arduino
Pour éviter les chutes de tension, quand le servomoteur est en fonctionnement, on utilise deux condensateurs de 100 μF placés en parallèle avec le servo-moteur et le potentiomètre :

Le programme
Voici le code de l’activité :
|
#include <Servo.h> Servo myServo; int const PotPin= A0;
} void loop() { myServo.write(angle); |
Déroulement du programme :
– 1. Insertion des bibliothèques :
. Insertion de la librairie « Servo »
. Initialisation du servo-moteur (« Servo myServo »)
– 2. Déclaration des constantes et variables :
. int const PotPin= A0 (constante nombre entier correspondant à la broche d’entrée analogique de l’Arduino reliée au potentiomètre)
. int PotVal (Variable nombre entier pour stocker la valeur de la broche du potentiomètre)
. int angle (Variable nombre entier pour stocker la valeur de l’angle de rotation du servo-moteur)
– 3. Initialisation des entrées et sorties :
. Initialisation de la liaison série à un débit de 9600 bauds
. Initialisation de la broche de contrôle du servo-moteur
– 4. Fonction principale en boucle :
–> Lecture de la valeur de la broche d’entrée analogique de l’Arduino reliée au potentiomètre,
–> Conversion de cette valeur en angle de rotation (0 – 180 °),
–> Affichage des valeurs dans le moniteur série,
–> Rotation du servomoteur de l’angle défini par le potentiomètre.

