” Vitesse & Distances ”
(Cliquez pour afficher la version PDF)
Nous avons vu qu’il était possible, avec un Arduino, de produire des ondes sonores, caractérisées par leur fréquence. Nous allons maintenant, nous intéresser à la vitesse de propagation des ondes ultrasonores à l’aide du circuit suivant :
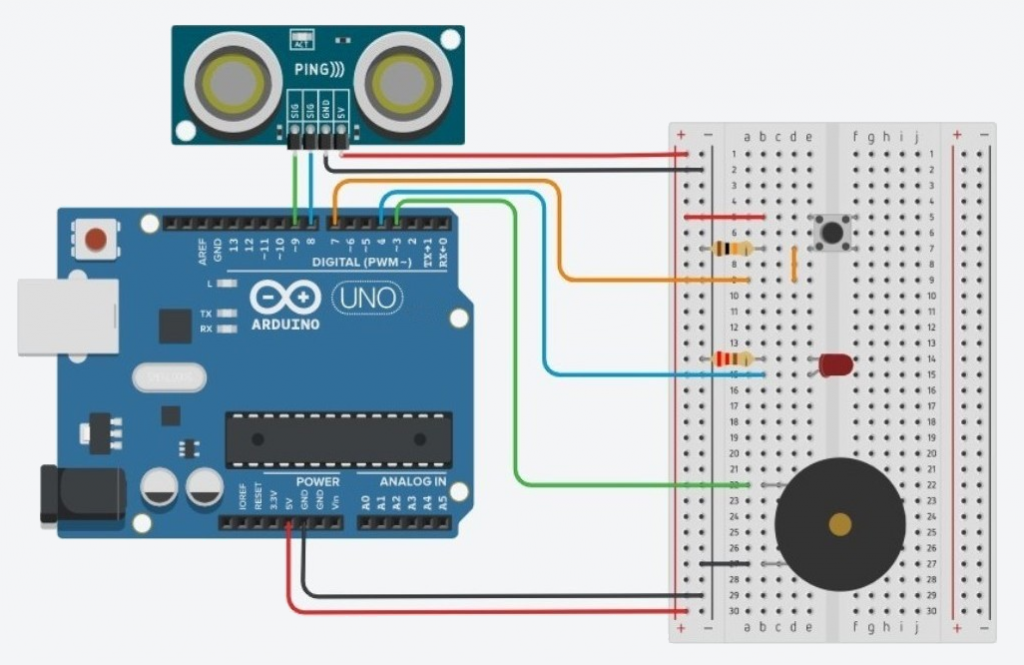
. Liste des composants :
. 1 capteur ultrasonique (HC-SR04)
. 1 DEL Rouge
. 1 résistance de 220 Ω (résistance de protection de la DEL)
. 1 résistance de 10 kΩ (résistance du bouton poussoir)
. 1 bouton poussoir
. 1 haut-parleur (ou piezo)
. 1 plaque d’essai
. Fils de connexion
. Rappels sur le son
Le son est une onde mécanique qui se propage dans un milieu matériel fluide (air, eau) ou solide et les ondes sonores sont caractérisées par leur fréquence.
Les sons audibles par l’Homme ont des fréquences comprises entre 20 et 20000 Hz, les infrasons ont une fréquence inférieure à 20 Hz, et les ultrasons sont situés au-delà de 20 kHz.
La vitesse de propagation, ou célérité, du son est indépendante de sa fréquence mais dépend du milieu de propagation : plus le milieu matériel est dense plus la vitesse est grande.
Par exemple : c (air) = 340 m.s-1 ; c (eau de mer) = 1 500 m.s-1 ;
c (acier) = 5000 m.s-1
La célérité du son dépend de la température, c’est-à-dire de l’agitation des particules qui constituent le milieu de propagation: plus la température est élevée plus le son se propage vite.
Par exemple : c (air à 0°C) = 331 m.s-1 ; c (air à 15°C) = 340 m.s-1
La relation entre la vitesse du son dans l’air en m.s-1 et la température en kelvins est :
(T en kelvins = T en °C + 273,15)
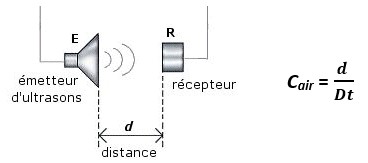
La célérité dans l’air, en m.s-1, peut être déterminée expérimentalement en mesurant la durée de propagation Dt, en s, de l’onde sonore, entre un émetteur et un récepteur situés à une distance d, en m, grâce à la relation :
On peut également utiliser un ensemble émetteur – récepteur d’onde ultrasonores placé devant un obstacle. C’est le principe de la mesure par écho ou du Sonar :
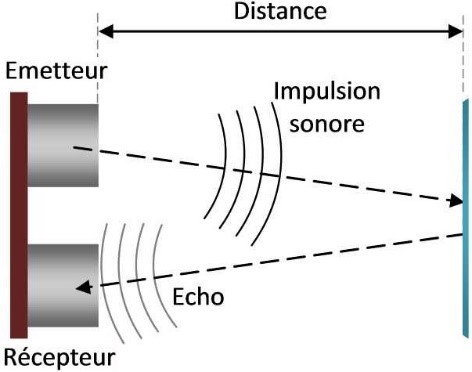
Dans ce cas, la distance parcourue par l’onde sonore, pendant la durée Dt, est 2 d, et alors :
. Principe de fonctionnement des émetteurs et récepteurs à ultrasons
Les émetteurs et récepteurs à ultrasons sont aussi appelés transducteurs piézoélectriques, car ils convertissent une énergie électrique en énergie mécanique et réciproquement. Le principe de fonctionnement est donc identique à celui des buzzer.
Extérieurement les transducteurs d’émission (généralement, repérés par un « T » gravé) sont très semblables à ceux de réception (généralement, repérés par un « R » gravé) :
Un schéma de principe de ces transducteurs est donné ci-dessous :
. Fonctionnement d’un émetteur US :
Le transducteur est alimenté par une tension alternative à une fréquence nominale de fonctionnement (souvent 40 KHz). Cette tension, est appliquée sur les lamelles métalliques ce qui génère une déformation mécanique des céramiques qui est transformée en pression acoustique appliquée à l’air ambiant, via le cornet acoustique.
. Fonctionnement d’un récepteur US :
La pression acoustique (due à l’onde ultrasonore) reçue à travers l’air ambiant, via le cornet acoustique du récepteur US, est transformée en contrainte mécanique dans les céramiques qui génèrent des charges électriques sur les lamelles métalliques et donc une tension alternative à ses bornes.
Avec un Arduino, l’ensemble émetteur – récepteur d’onde ultrasonores ou le capteur ultrasonique le plus couramment utilisé est le HC-SR04.
. Capteur ultrasonique HC-SR04
Caractéristiques
Le capteur est composé d’un émetteur d’ultrasons, d’un récepteur et du circuit de commande. Il est généralement utilisé pour mesurer des distances entre le capteur et un obstacle.
- Dimensions : 45 mm x 20 mm x 15 mm
- Plage de mesure : 2 cm à 400 cm
- Résolution de la mesure annoncée : 0,3 cm (en pratique : 1 cm)
- Angle de mesure efficace : 15 °
Broches de connexion
- Vcc = Alimentation +5 V DC
- Trig = Entrée émetteur d’impulsion d’ultrasons (Trigger input)
- Echo = Sortie récepteur d’impulsion d’ultrasons (Echo output)
- GND = Masse 0V
Spécifications et limites
- Tension d’alimentation : 5.0 V à ± 0.5 V
- Courant de repos : 2.0 mA à ± 0.5 mA
- Courant de fonctionnement : 15 ± 5 mA
- Fréquence des ultrasons : 40 kHz
Principe de fonctionnement :
- Envoyer un signal numérique à l’état haut sur l’émetteur pendant 10 µs,
- Le capteur envoie automatiquement 8 impulsions d’ultrasons à 40 kHz,
- A la fin des 8 impulsions, la sortie Echo du capteur passe à l’état haut,
- Si le signal revient et est détecté par le récepteur, la sortie Echo du capteur passe à l’état bas. La durée de l’état haut du signal Echo correspond au temps entre l’émission des ultrasons et leur réception.
Le principe de fonctionnement est résumé sur le schéma suivant :
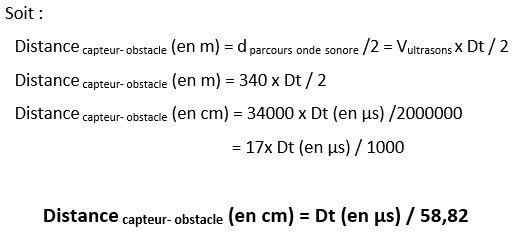
La formule couramment utilisée dans les programmes Arduino permettant de calculer la distance entre le capteur et un obstacle est :

En effet, pour cela, on suppose que la vitesse des ultrasons dans l’air est de V = 340 m.s-1, la distance parcourue, d (en m), par l’onde sonore pendant la durée, Dt (en s), est alors :

. Les activités
- Activité 1: Détermination de la vitesse du son dans l’air
- Activité 2: Mesure de distances
- Activité 3: Détecteur d’obstacles

